
Giỏ hàng của bạn đang trống!
Danh mục sản phẩm
- KHUYẾN MÃI (22)
- Raspberry Pi 5 (22)
- SẢN PHẨM MỚI NHẤT (35)
- ASUS Tinker (51)
- Chơi âm thanh (6)
- Màn hình (51)
- Raspberry Pi 4 Model B (94)
- AI Computer and System on Module (55)
-
NVIDIA Jetson Nano Developer Kit (123)
- Module 4G/3G/2G/GNSS dành cho NVIDIA Jetson Nano (7)
- Màn hình LCD cho Jetson Nano (16)
- Robot dành cho Jetson Nano (2)
- Jetson AI Boards (27)
- Camera cho Jetson Nano (32)
- Nguồn cho Jetson Nano (14)
- Vỏ hộp và quạt tản nhiệt cho Jetson Nano (8)
- Module cho Jetson Nano (10)
- Phụ kiện khác cho Jetson Nano (17)
- LattePanda (38)
- BeagleBone (6)
- Raspberry Pi B+/Raspberry Pi2/Raspberry Pi3 (261)
- Raspberry Pi Zero (24)
- Module Boards (208)
- Modules cảm biến (113)
- Mạch Arduino (66)
- Mô hình Robot (20)
- Robot dành cho Raspberry Pi (8)
KHUYẾN MÃI





Module GPS L70R




Giá: 400,000 vnđ

MÔ TẢ CHUNG
Module GPS L70R là module thu thập thông tin được gửi về từ các vệ tinh GPS . Các thông tin này bao gồm: thời gian thực, vị trí, tọa độ, vận tốc,... của chính Module . Kết hợp module này với một máy tính hoặc một board mạch Vi xử lý như Arduino là bạn đã có thể làm được một số ứng dụng như thiết bị theo dõi hành trình, thiết bị chống trộm, đồng hồ thời gian thực ...
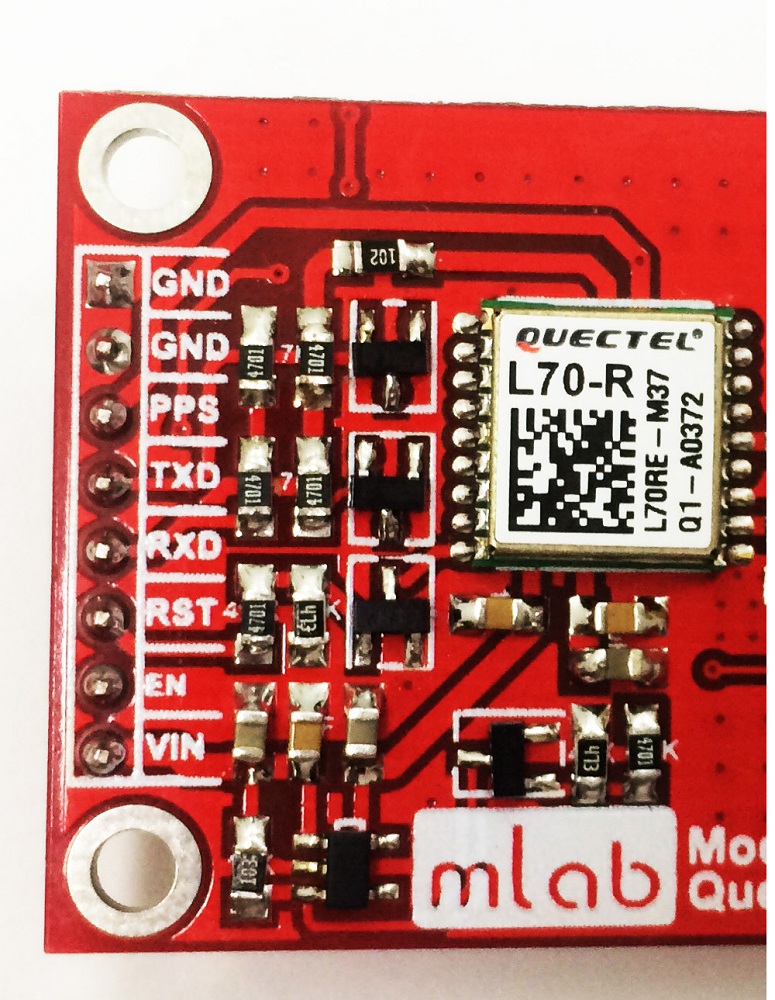
Module GPS L70-R được MLAB thiết kế dựa trên module L70-R của hãng Quectel, loại module GPS mà đang được sử dụng nhiều tại các công ty làm về giám sát hành trình ở Việt Nam.
Module được thiết kế, sản xuất đảm bảo chất lượng với mục tiêu không chỉ hướng tới việc xây dựng các mô hình nghiên cứu, học tập mà muốn nó trở thành một phần trong các sản phẩm điện tử thương mại của người dùng.
ĐẶC ĐIỂM
- Nguồn đầu vào: 3.3VDC - 5VDC
- Giao tiếp UART , tốc độ mặc định là 9600bps
- Sử dụng được với cả MCU 5V và 3.3V
- Có chân điều khiển việc bật/tắt nguồn cấp cho module
GIAO DIỆN GHÉP NỐI
|
+ GND: 0VDC + PPS: là chân báo tín hiệu khi bắt được tín hiệu GPS, tín hiệu này dưới dạng xung 1Hz + TXD: là chân đọc tín hiệu UART của module, chân này được nối với chân TXD của MCU + RXD: là chân xuất tín hiệu UART của module, chân này được nối với chân RXD của MCU + RST: là chân reset module, tích cực ở mức cao + EN: dùng để bật/tắt nguồn cấp cho module. Mặc định, nguồn luôn được cấp cho module, với chân EN để hở hoặc được kéo xuống mức thấp . Để tắt module, đưa chân EN lên mức cao. + VIN: chân cấp nguồn cho module, từ 3.3VDC - 5VDC. MCU và Module GPS L70-R cần cấp chung nguồn 5V/3.3V để 2 thiết bị tương thích mức điện áp giao tiếp UART. |
 |
(Lưu ý: Anten GPS phải để ngoài trời hoặc gần cửa sổ thì mới có thể bắt được tín hiệu từ vệ tinh GPS )
CHẾ ĐỘ BẢO HÀNH VÀ CÁC DỊCH VỤ HỖ TRỢ KHÁCH HÀNG
Với mong muốn hỗ trợ khách hàng để khách hàng có thể tiếp cận và sử dụng thiết bị nhanh nhất, an tâm khi sử dụng thiết bị do MLAB thiết kế, các sản phẩm của chúng tôi khi gửi tới tay khách hàng :
+ Bảo hành 1 năm với lỗi do MLAB sản xuất.
+ Các sản phẩm trước khi tới tay người dùng đều đã được test thành công.
+ Khách hàng có thể sử dụng thiết bị theo các hướng dẫn trong các bài viết kỹ thuật của MLAB, hoặc các tài liệu tham khảo mà MLAB đính kèm trong phần mô tả của mỗi sản phẩm trên website mlab.vn
- Mọi ý kiến phản hồi, đóng góp, chia sẻ mong được bạn đọc và quý khách hàng comment dưới : các bài viết kỹ thuật ; video liên quan tới sản phẩm và bài viết ; post chia sẻ về sản phẩm và bài viết trên Facebook : MLAB. Chúng tôi sẽ đón nhận ý kiến của mọi người và nâng cao chất lượng bài viết, video với mong muốn hỗ trợ tốt nhất cho khách hàng và bạn đọc.
+ Khách hàng có thể liên hệ tư vấn mua hàng, tư vấn kỹ thuật :
- Tại cửa hàng : số 30F9, ngõ 104 Lê Thanh Nghị - Hai Bà Trưng , Hà Nội
- Theo email , số điện thoại, Skype của các nhân viên trong các bộ phận có tại website : mlab.vn
- Facebook của MLAB : https://www.facebook.com/mlab.com.vn/
+ Một số chính sách khác của MLAB : Chính sách vận chuyển và giao nhận ; Chính sách bảo hành ; Chính sách đổi trả và hoàn tiền .
THAM KHẢO
MLAB :
Hướng dẫn sử dụng Module GPS L70R
http://mlab.vn/52441-huong-dan-su-dung-module-gps-l70r.html
Hướng dẫn lập trình Module GPS L70R với Arduino
Module GPS L70R với Raspberry Pi
Các bạn có thể tải tài liệu tham khảo cho GPS Quectel L70R tại : Quectel L70R Documents
Phần mềm test :
Module USB to UART PL2303 : PL2303
Viết đánh giá
Họ và tên:Đánh giá của bạn: Lưu ý: Không hỗ trợ HTML!
Bình chọn: Xấu Tốt
Nhập mã bảo vệ:
